目前因Greengrass IoT有協助解決原本存在於Greengrass上的問題,因此打算這階段就恢復使用Greengrass取代MQTT。
以Greengrass的概念我們必須把所有東西container化。因此在這個階段就先使用之前已經準備好CI/CD搭配Jenkins+ArgoCD的部分,把DevOps概念先導入。
整體而言我們可以將架構圖改成以下: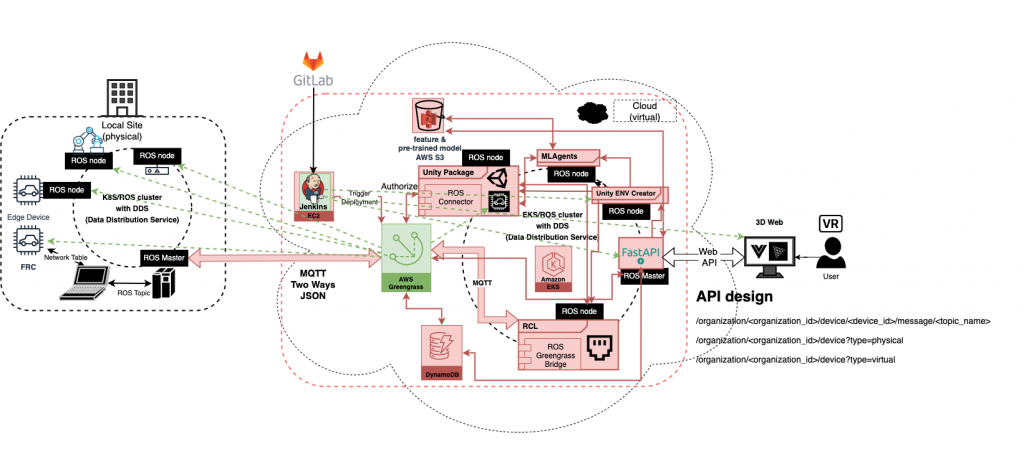
紅色虛線框框代表我們這次要著重的,在於cloud的virtual環境。
主要三項重點如下:
POST /organization/<organization_id>/device/
GET /organization/<organization_id>/device/<device_id>
GET, POST /organization/<organization_id>/device/<device_id>/message/<topic_name>
上面包含要取出的設備ID,與該設備可以監聽與送出的ROS topics(包含自定義topics)
GET /organization/<organization_id>/device?type=physical
GET /organization/<organization_id>/device?type=virtual
還可以依照虛擬或是在local端真實的edge devices,各別做取出設備列表資料的動作。
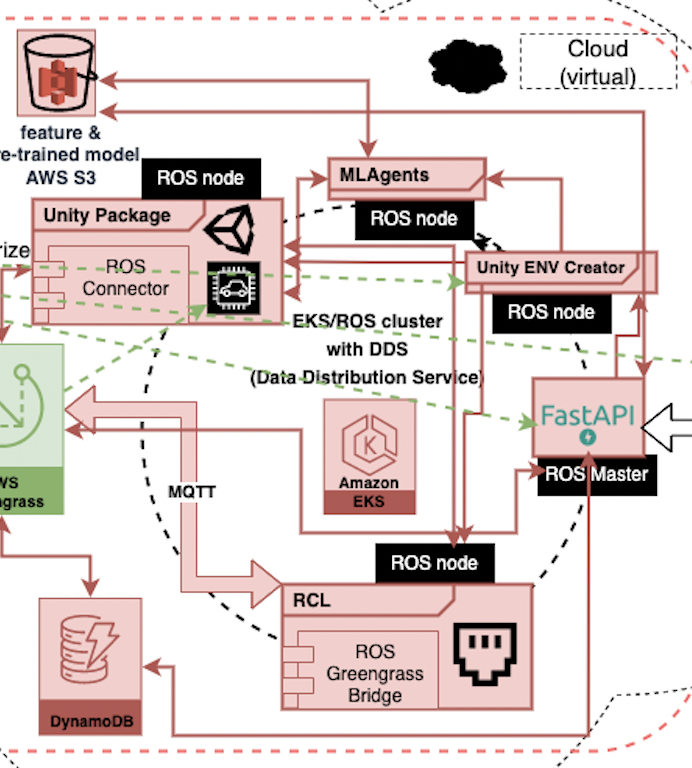
為了方便控管運算配置資源(cpu/memory)與動態擴展VM node,我們將整個ROS cluster的機制建置在EKS上,這個在前幾篇文章有提到。
unity_env_creator程式會在當前端呼叫POST /organization/<organization_id>/deviceAPI時,在EKS上產生一個新的EKS POD,該POD中的device會自動與Greengrass做Authorization,且裡面包含Unity以及要跑的Unity 3D model(含modeling過後的sensors),和要執行的AI訓練程式。
訓練過程,Unity node會主動將資料交由Greengrass Bridge ndoe,把ROS topics訊息傳給Greengrass,同時也將ROS topics的資料按照timestamp順序儲存在DynamoDB。client端的用戶可以透過不管是Web(上一篇提到的前端讀取檔案格式與顯示的方式),又或是直接開啟Unity來同步取得(call API)訓練過程的ROS topics的資料,來同步呈現畫面。
訓練完畢後,產生的pre-trained model(.pickle)就會儲存在AWS S3中,提供給後續不管是virtual還是地端physical的devices使用。這部份詳細流程,與之前在我medium提到PAIA系統怎麼在雲端上train model大同小異。但這裡與PAIA稍微不同的是,這些virtual devices在訓練完畢後,大部份是不必自動刪除掉(可利用API帶參數控制),因為DigitalTwins(數位雙生)的概念,我們會有狀況是實體與虛擬同時存在互為mirror。
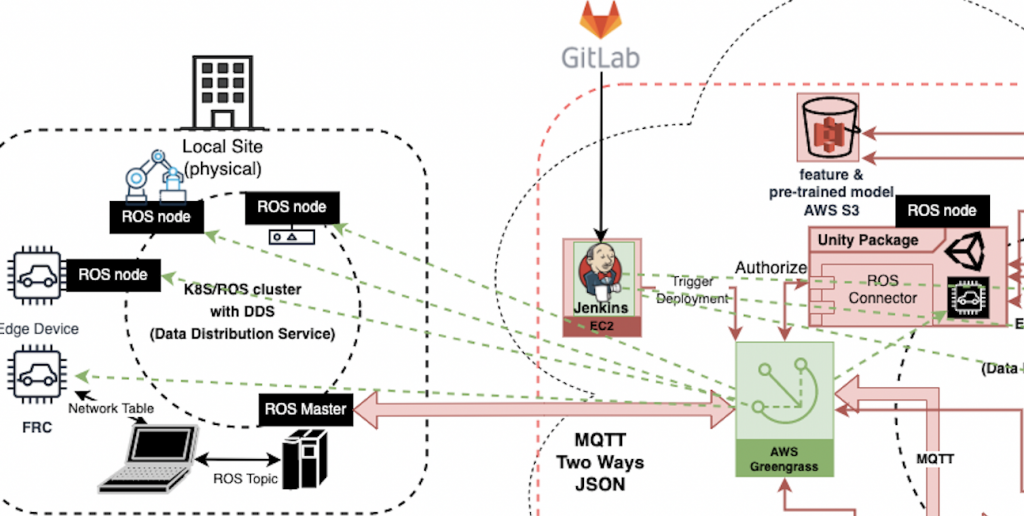
Deployment是在架構圖中顯示綠色的部份。因為Greengrass除了MQTT的功能外,它也包含了與設備(virtual and physical)之間的TLS認證,與元件(component)更版的流程控制。
因此當我們元件的code(commit or tag)有更版的時候,因統一由Jenkins決定更新哪一個service(API, Creator, or trigger Greengrass deployment process)或component,這個部分就需要寫較多大量的scripts(可使用Greengrass cli)來完成。
這樣就完整利用到AWS cloud的服務,完成我們這專案要做的POC架構。
其中Virtual環境的部分,AWS有提供robomaker的solution,但因為在今年6/27號的時候,robomaker的features有一些change,暫時先不考慮變動比較大的service。
目前這架構還在與AWS討論階段,期望可以在鐵人賽結束前完成這架構的POC。


 iThome鐵人賽
iThome鐵人賽